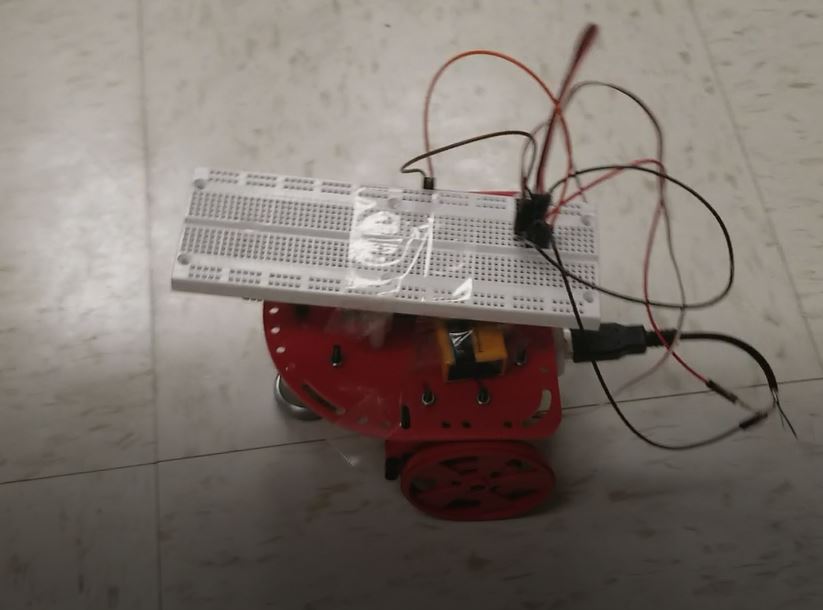
Learn basic functionalities of the Arduino Uno and the Arduino IDE, and assembly a basic robot to perform a simple autonomous task.
Installed Arduino IDE
Download Link
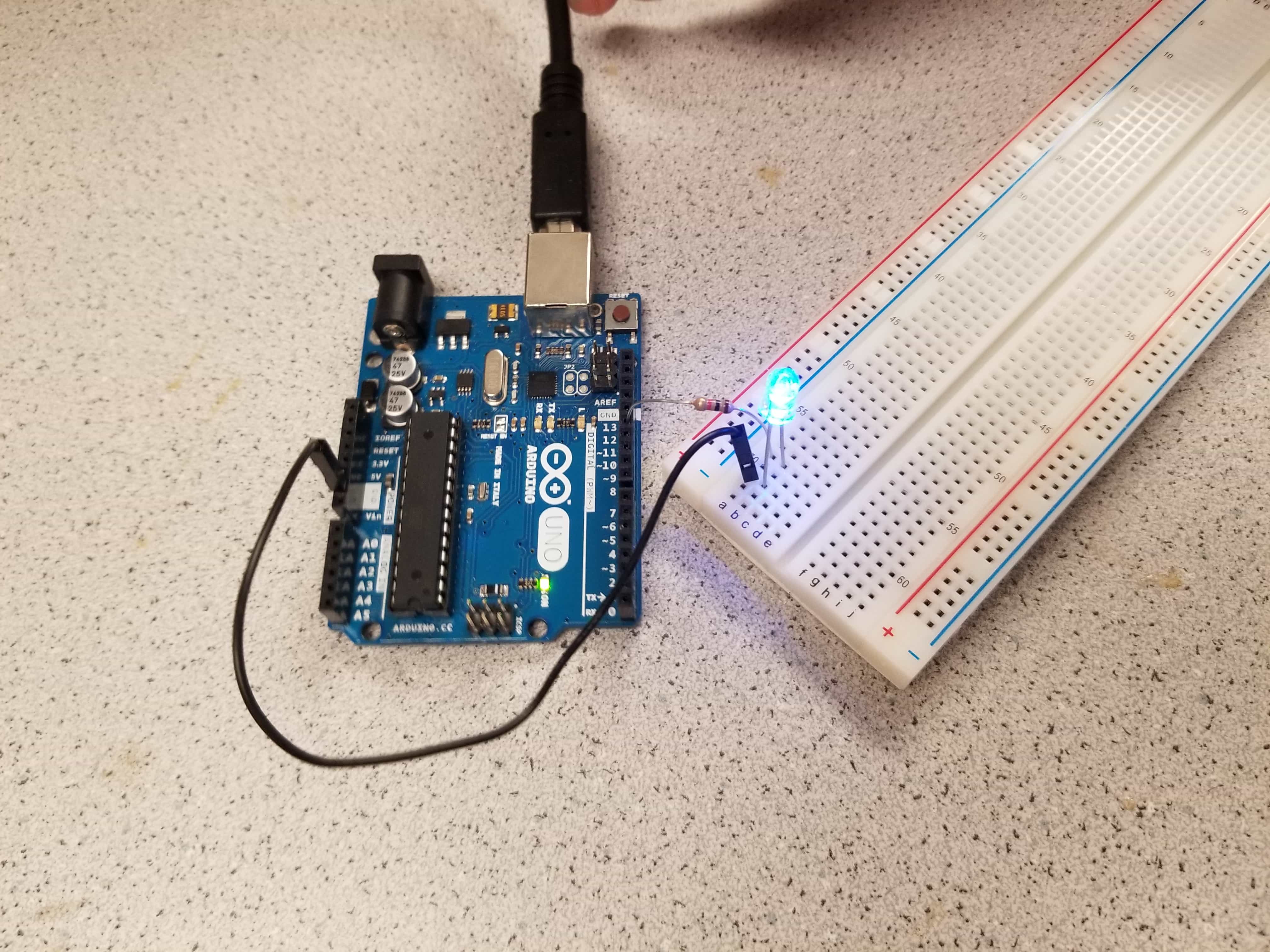
We first tested the example code “Blink”
The example can be found under: File > Examples > 1.Basics > Blink
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}

void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(5, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(5, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(5, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
Serial.begin(9600); //Sets the data rate in bits per second (baud) for serial data transmission.
value = analogRead(PIN_IN); //reading the value from the potentiometer
Serial.println(value); //Prints value to the serial port as human-readable ASCII text.
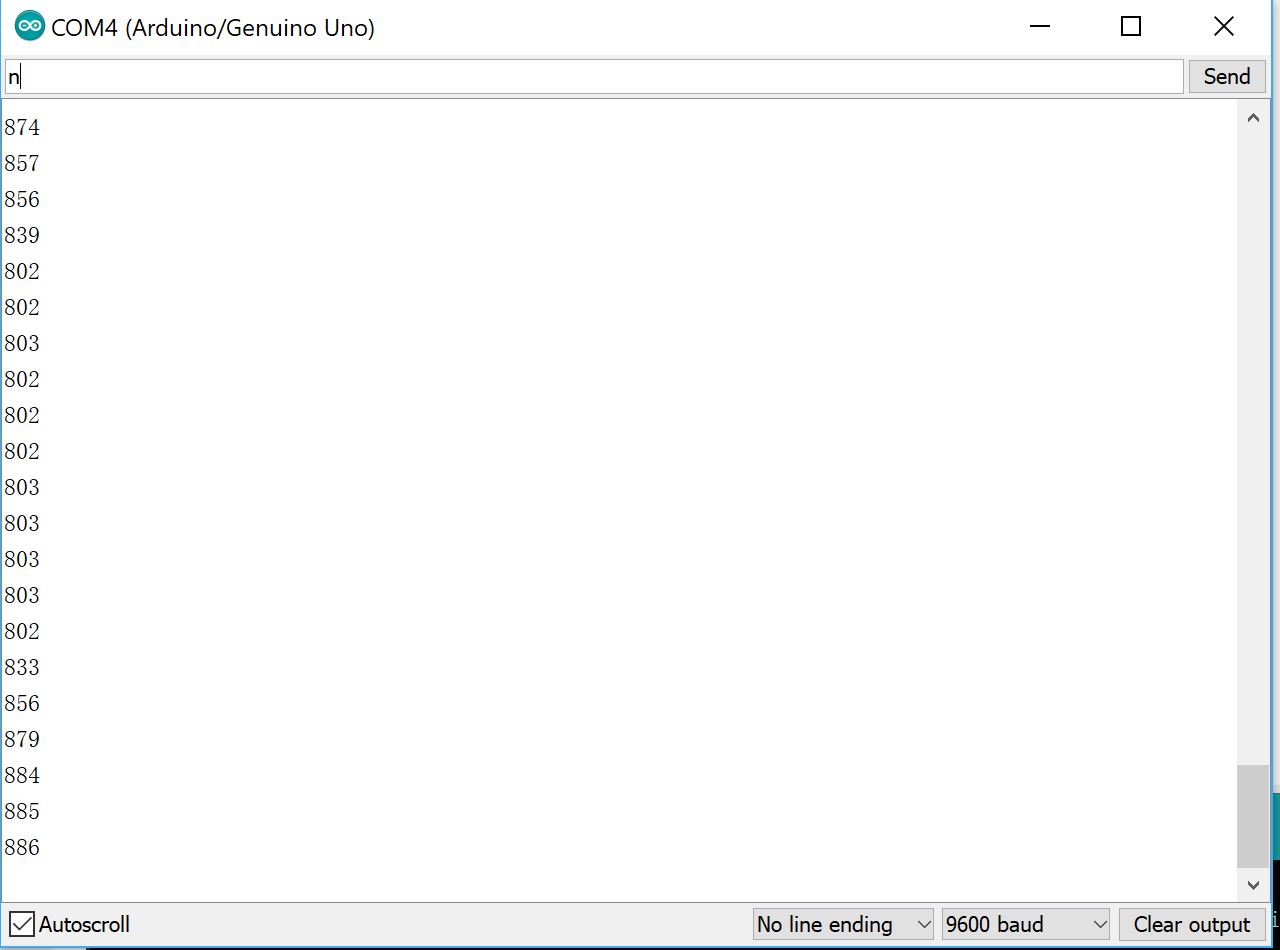
value = analogRead(PININ);//Reads an ADC conversion from pin A0 using default settings for the ADC.
Serial.println(value);//print value to screen
delay(100);//wait .1 sec
analogWrite(PINOUT,value>>2);//write value out to the LED
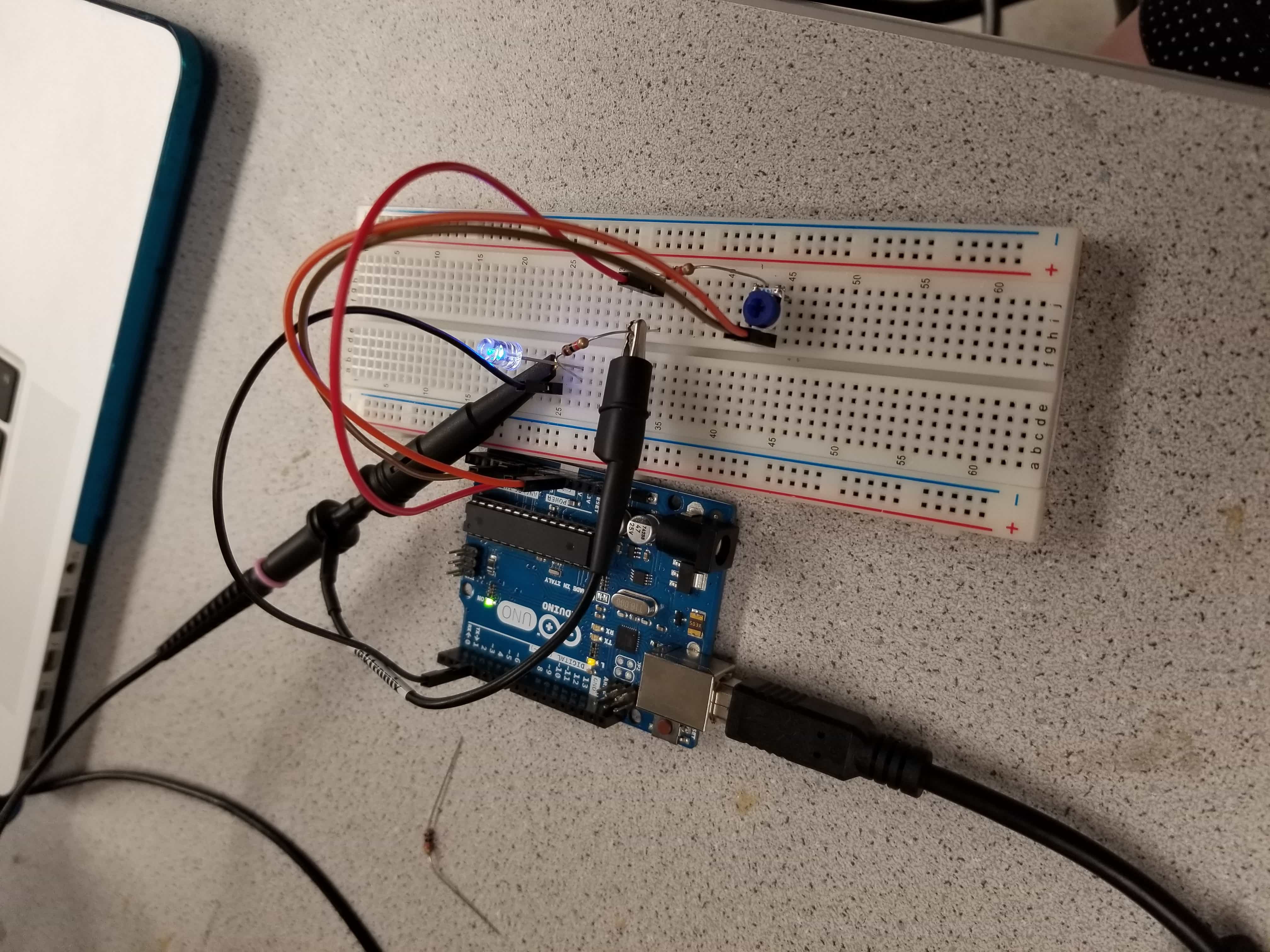
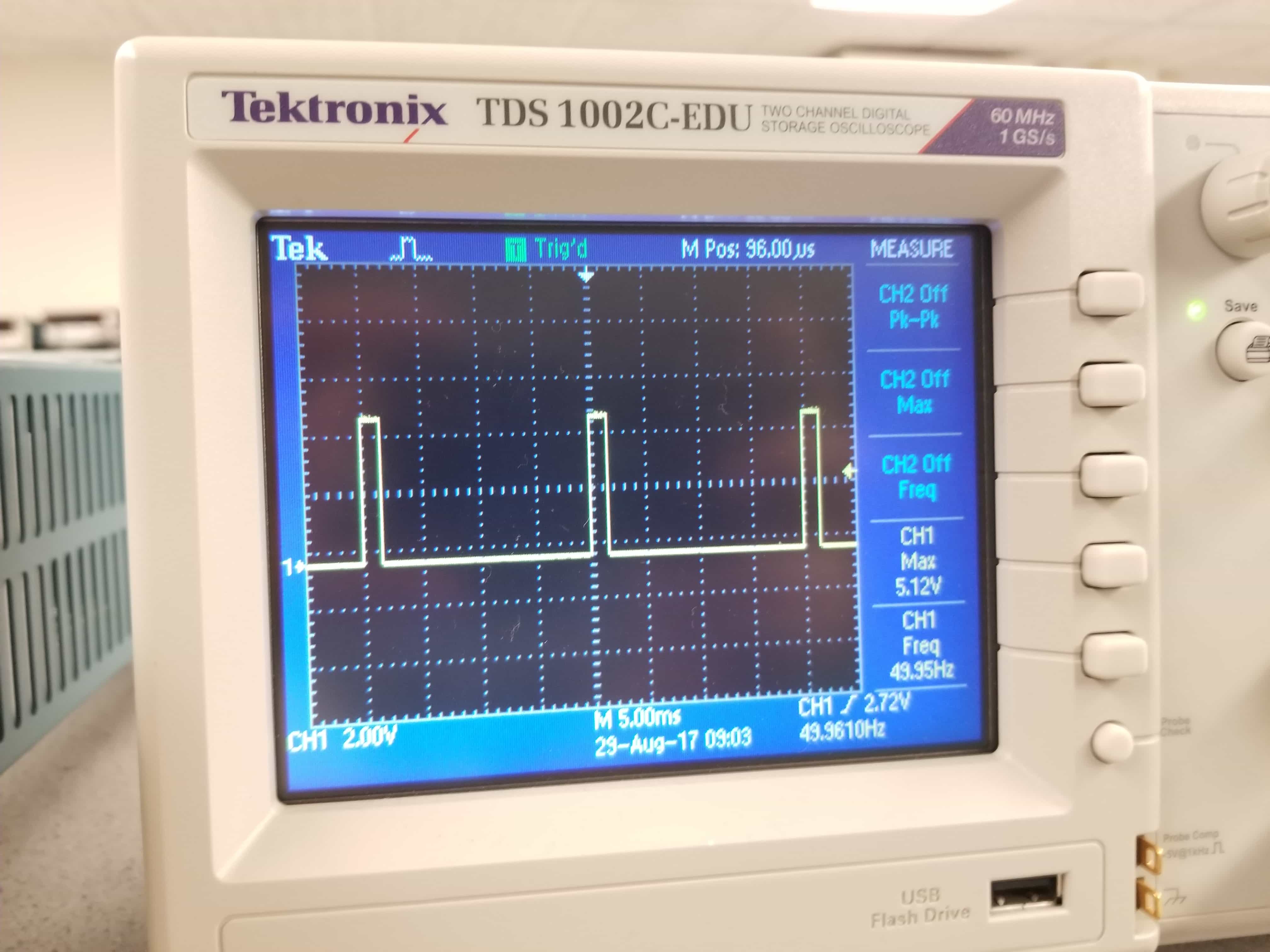
Oscilloscope: Freq at ~50Hz
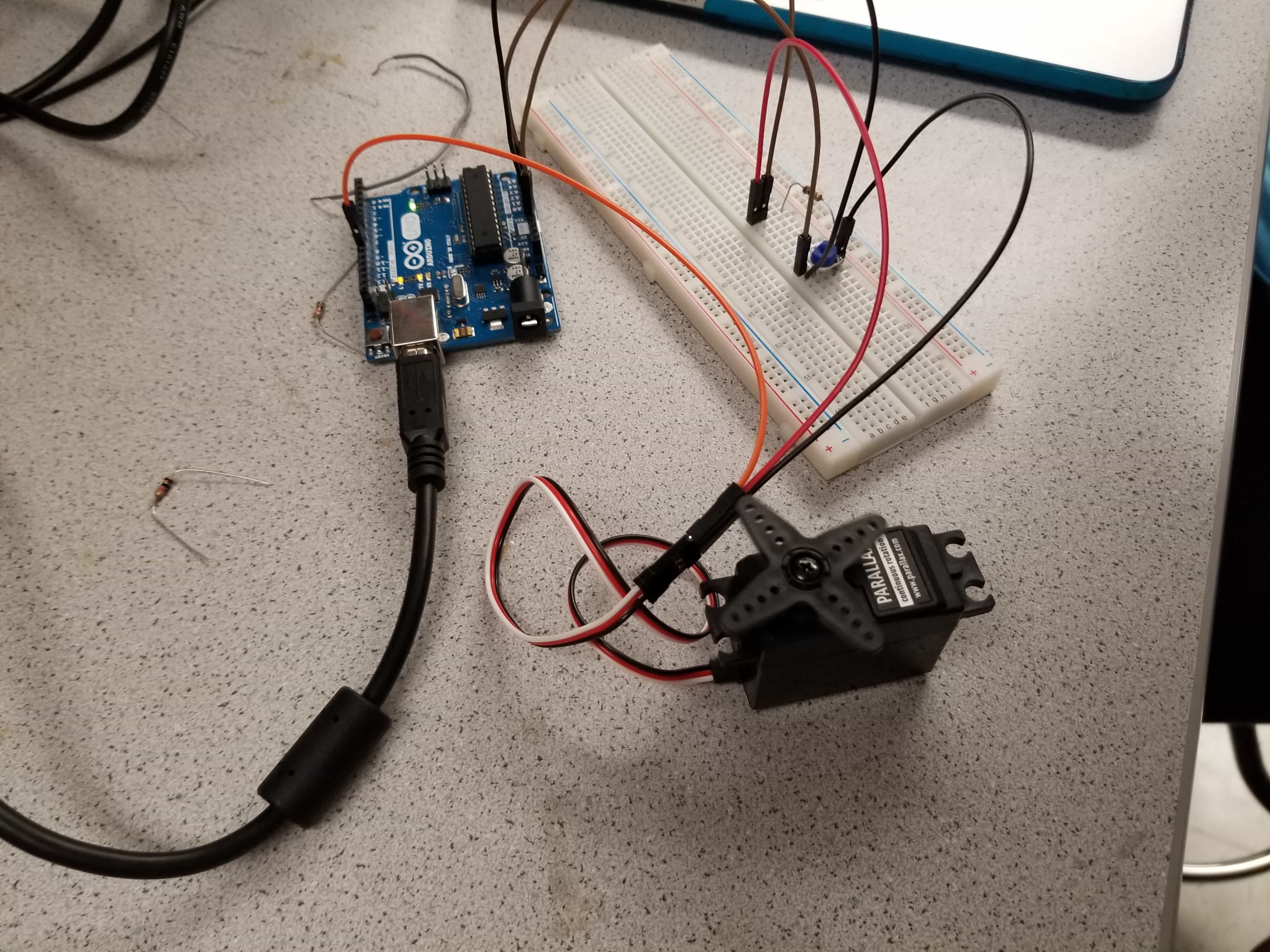
#include <Servo.h> //import Library
Servo servo1; //Declare instance of servo
servo1.attach(10); //Attach the servo input to pin 10 (PWM)
servo1.write(0); //ouputting 0 = max speed reverse, 90 = stop, 180 = max speed forward
Oscilloscope: Freq at ~50Hz


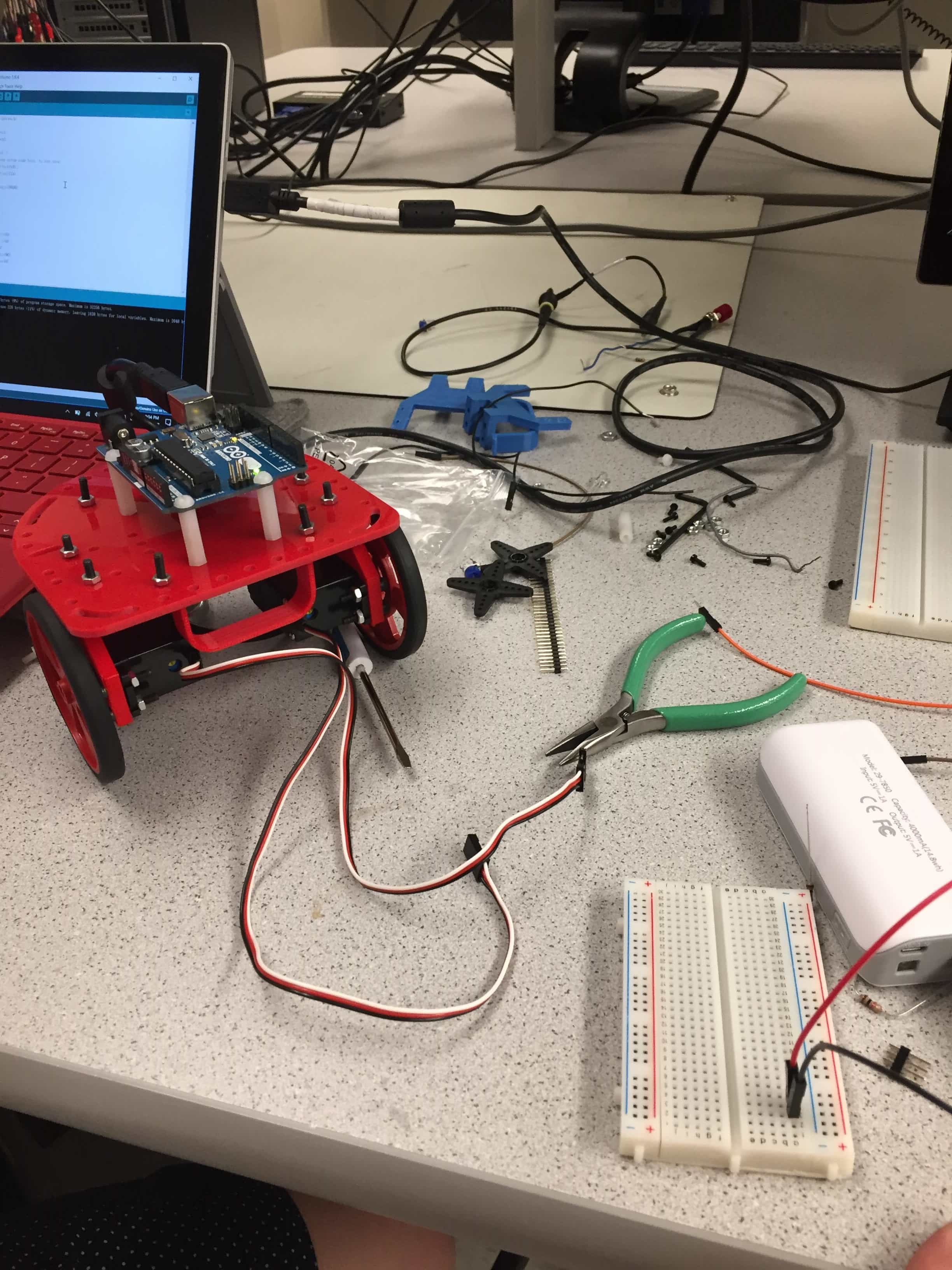
void loop() {
servo1.write(0); //servo1 go forward
servo2.write(180); //servo2 go forward
delay(1000); //Go forard for 1 second
servo1.write(90); //servo1 stop
delay(500); //Turn for .5 second
}